Mechanical Design
Mechanical Design
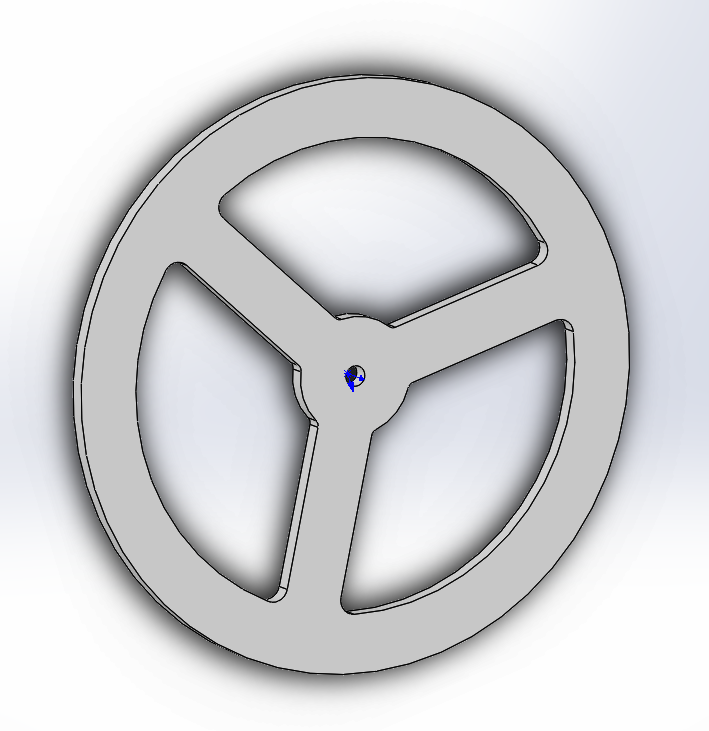
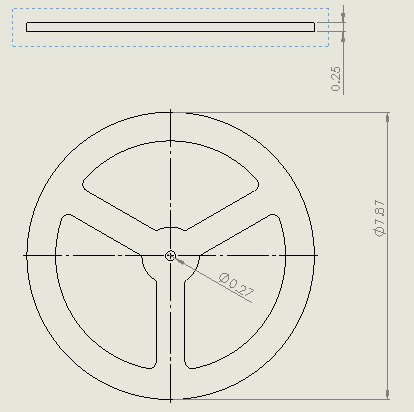
Reaction Wheel
The reaction wheel is the physical wheel turned to correct the angle of the robot.To maximize the moment of inertia while minimizing the mass, we chose a shape as close to a hoop as possible. The wheel (~8 in diameter) was then water-jet cut out of a 12x12x1/4 in sheet of aluminum, and the hole in the middle was tapped to screw onto the motor (M8 x 1.25mm pitch). The CAD model and drawing is shown below.
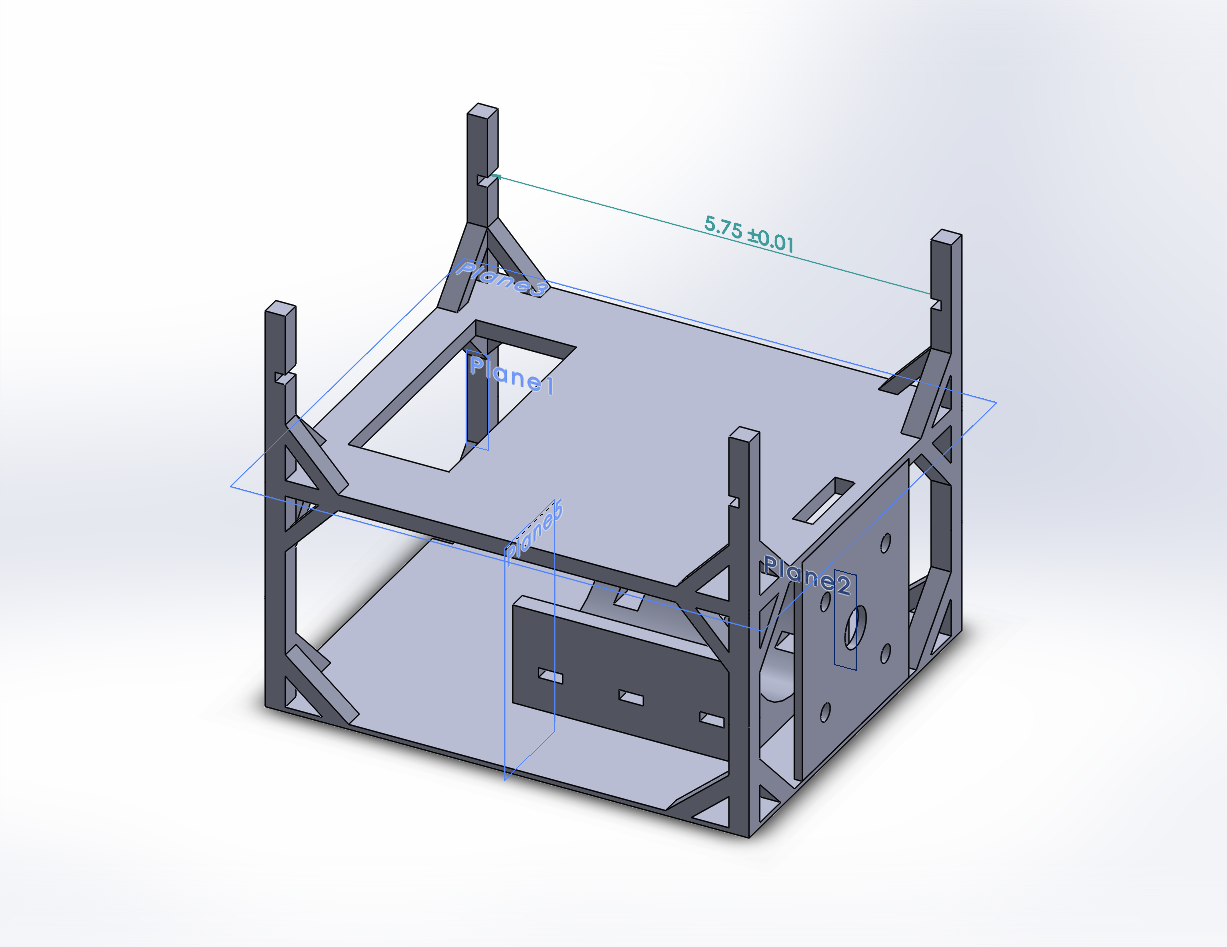
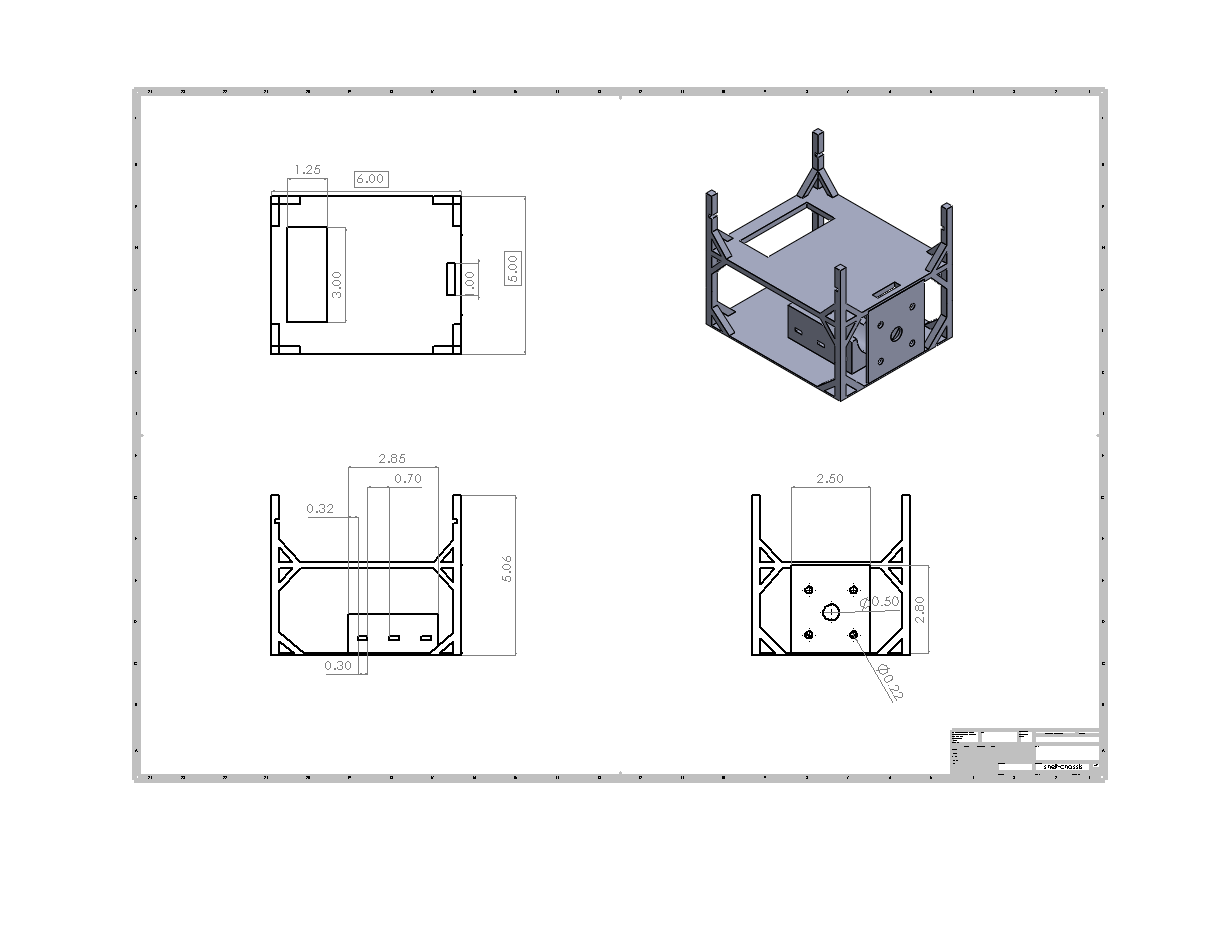
Robot Body
The main body of the robot was designed in SolidWorks then 3-D printed. The main features of the body are a pocket for the motor to fit into, holes for the encoder to fasten to, and shelves for the breadboard and E155 development board (FPGA+MCU). This design was meant to keep the body highly adjustable, so tweaks to electronics could be made after the print. The CAD model and drawing is shown below.